Japan is developing tooling for initial blanket assembly
A specific set of robotic tools is being developed in Japan to support the initial assembly of ITER blanket components. Designed to operate within tight space constraints, these tools can grip, fasten, tighten, weld, and cut with exceptional precision. In this interview, team leader Tanaka Takeyuki from the Japanese Domestic Agency discusses the challenges of creating these multifunctional robotic tools and explains how insights gained during early assembly operations will help shape the remote handling strategy for blanket maintenance during ITER operation.
Can you describe what “initial assembly” of the ITER blanket entails, and what types of remote handling tools will be required?
In ITER, the initial assembly of the blanket is scheduled to take place over several months starting in 2032 and will mark a critical step on the path to starting plasma operation in 2034. During this phase, 440 blanket shield blocks must be transported to their specific positions inside the vacuum vessel and bolted to the structure through interfacing components such as flexible cartridges and key pads. The heavy shield blocks will be transported using conveying equipment such as tower cranes, while precision tasks—such as bolt tightening and loosening, or pipe welding and cutting—will be carried out using technologies similar to those used in remote maintenance. In Japan, we are developing the end effectors (peripheral devices that are attached to a robotic arm) and tools for gripping, fastening, and cooling pipe welding and cutting.
Rather than being limited to simple handling, the grippers are designed as multifunctional end effectors capable of securely holding blanket modules while also performing temporary bolt tightening. This versatility is essential during early-stage assembly, when multiple tasks must be executed within confined spaces.
Once the blanket modules are temporarily secured, the bolts must be tightened with a very high torque so they can withstand the forces of plasma operation. In addition, the cooling water pipes—either between adjacent blanket modules or between modules and the main cooling channels—must be welded. For these initial assembly activities, we need dedicated bolt-tightening tools and welding tools.
How can the development and the implementation of these initial tools inform work underway on the blanket remote handling system—the robotic system that will be used for the maintenance of the ITER blanket when the machine is operating?
Japan has been working on the development of the blanket remote handling system under a Procurement Arrangement signed with the ITER Organization and is bringing this experience to bear in the development of tools for initial blanket assembly.
In contrast to the blanket remote handling system—which will carry out the remote maintenance of blanket modules under high‑radiation conditions—the grippers and tools for initial assembly will be used inside the vacuum vessel in a non-radiological environment. Because this phase takes place before plasma operation, operators can work in close proximity to the equipment, allowing direct observation of tool behaviour and performance in confined spaces. This hands-on access during pre-activation assembly provides a unique opportunity to gather practical insights that would not be available once the system becomes activated. These observations can then be systematically applied to improve tool maintainability, refine remote handling strategies, and guide design improvements for future high-radiation environments, ultimately strengthening ITER’s long-term remote maintenance approach.
What are some of the challenges that are inherent to developing this type of high-precision, multifunctional robotic equipment?
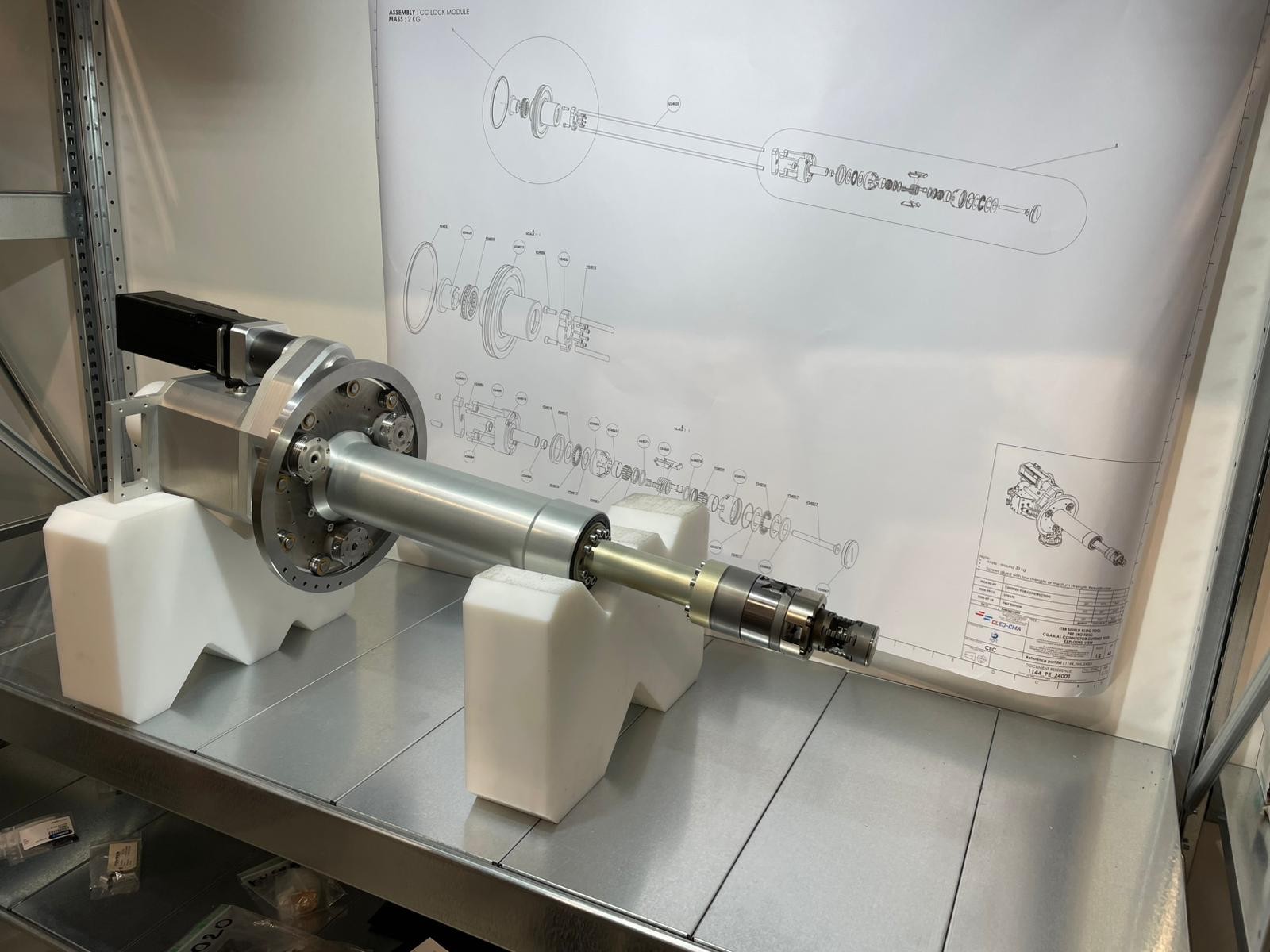
Among the many engineering challenges, one stands out as particularly demanding—achieving reliable welding from an extremely confined workspace, the interior of a bore hole. Unlike conventional pipe welding that is typically performed from the outside, the spatial constraints in fusion reactors makes this approach unworkable. Instead, we are developing technology that involves the insertion of tools into the narrow interior of the cooling pipes (inner diameter = 43.7 mm) and welding or cutting the pipe from the inside.
The limited space in the blanket assembly environment imposes strict constraints on tool size and articulation, approach angles, and stability during welding. Designing a mechanism that can manoeuvre with sufficient precision—without compromising structural rigidity—requires the careful balancing of mechanical complexity, robustness, and operational reliability. We must also plan for a high level of cleanliness: at no time can metal shavings be allowed to drop into the vacuum vessel.
To conclude, the end effectors and tools for blanket initial assembly that we are developing will serve as a testbed for integrating advanced robotic functions, process-by-process workability, and human operational expertise into ITER’s assembly strategy. I strongly believe that the hands-on experience gained during the initial assembly phase will be invaluable for future remote handling maintenance and for the broader development of fusion reactors.
[Interview conducted by Chiaki Shiraishi, from ITER Japan.]
See this press release (in Japanese) from the National Institutes for Quantum Science and Technology.