Robots, outils et opérateurs au diapason
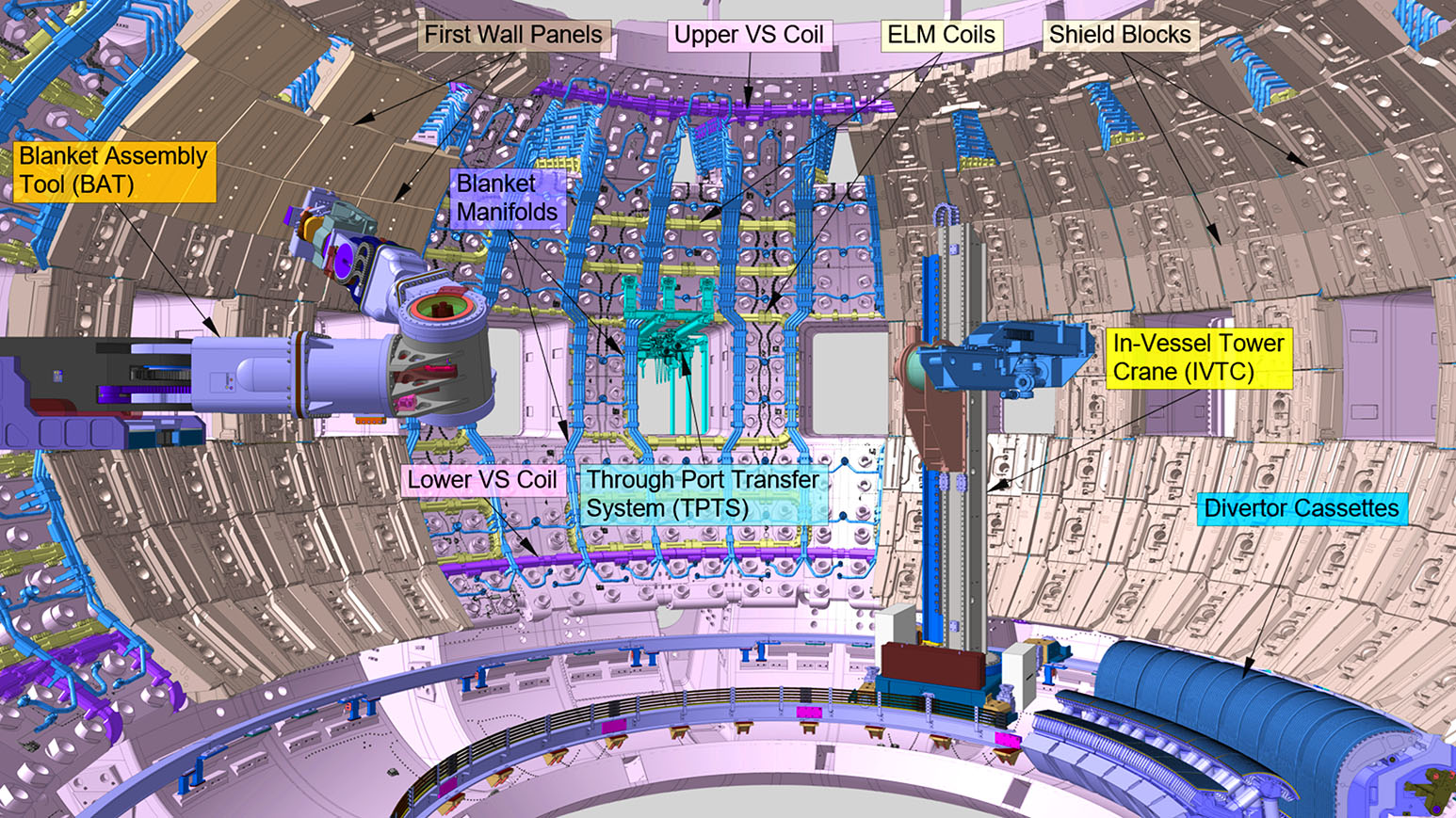
Un important « programme dans le programme » prend forme dans un des bâtiments d’ITER initialement réservé au béryllium et désormais dédié aux préparatifs de l’assemblage, ainsi que dans les usines d’Inde et du Japon. Son objectif ? Développer les robots et les outils qui permettront d’installer sur la paroi interne de la chambre à vide près de 20 000 composants de différentes tailles, dont la plupart auront été réalisés « sur mesure ». Le défi est immense : depuis les bobines, tubulures et modules de couverture qui tapisseront la paroi interne de la chambre à vide jusqu’aux panneaux de première paroi positionnés directement face au plasma, pas moins d’une demi-douzaine de « couches » comprenant chacune plusieurs milliers de composants viendront se superposer comme les peaux d’un oignon d’acier.

Tout comme les instruments d’un orchestre symphonique, les robots, outils et opérateurs vont se mettre au diapason pour mettre en musique une partition détaillée, une organisation du travail précise et évolutive dans laquelle les tâches seront réalisées en parallèle et non de manière successive.
« Pendant qu’une équipe spécialisée et ses outils d’assemblage se déplaceront d’une zone de la chambre à vide à la suivante pour installer une « couche » de composants, l’équipe suivante commencera sans attendre à travailler sur la couche suivante , explique Raphaël Hery, expert en télémanipulation et en robotique spécialisé dans les environnements difficiles comme l’installation de fusion inertielle française Laser Mégajoule et le système d’inspection en eaux profondes IRIS. Selon Raphaël Hery, cette stratégie de travail par « vagues roulantes » réduit nettement les temps d’installation et les risques associés.
Alors que certains des instruments qui exécuteront la symphonie des « vagues roulantes » dans la chambre à vide existent déjà et seront optimisés, la plupart d’entre eux doivent encore être développés. C’est là que Godzilla entrera en scène.


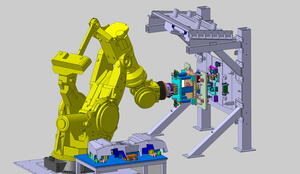
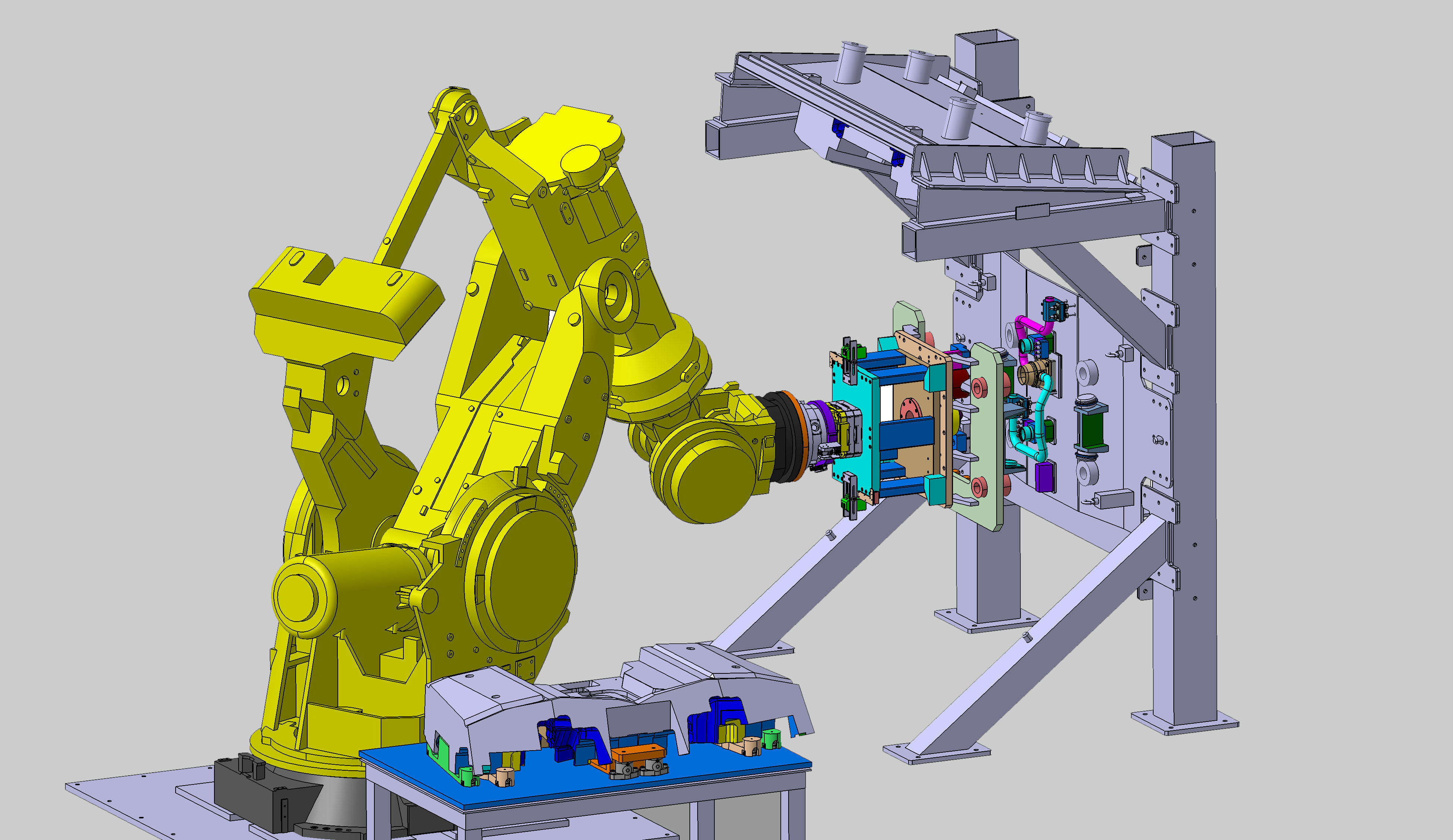
Installé au sous-sol du Bâtiment de préparation de l’assemblage du tokamak, Godzilla est le robot industriel le plus puissant du marché. Haut de quatre mètres et doté d’un bras pouvant s’étirer sur cinq mètres, il est capable de soulever et de déplacer des charges allant jusqu’à 2,3 tonnes. Cependant, malgré sa force herculéenne, Godzilla n’est pas destiné à manipuler les éléments face au plasma, dont certains pèsent plus de 4 tonnes. Il servira de plateforme pour le développement et l’intégration des outils et technologies destinés aux robots qui, eux, réaliseront les opérations d’assemblage dans la chambre à vide.
Parmi les outils actuellement testés sur la plateforme Godzilla figure un prototype partiel de « changeur d’outils » qui, comme son nom l’indique, permettra aux robots d’assemblage de passer rapidement, et en toute sécurité, d’un outil à un autre en fonction des séquences de travail. Cette fonctionnalité permettra de gagner un temps précieux car plus de 30 types d’outils spécifiques interviendront dans la procédure d’assemblage dans la chambre à vide, pour manipuler, boulonner, souder, inspecter ou découper les composants.
Les robots industriels « classiques » possèdent un « cerveau », des bras, des articulations et des « muscles », mais il leur manque deux compétences humaines essentielles : la vue et le toucher. Les robots spécialement conçus pour opérer dans la chambre à vide d’ITER seront capables de « voir » et de « sentir ». Équipés d’un système de vision développé par l’agence domestique européenne Fusion for Energy, ils pourront aligner avec précision chaque outil sur les cibles d’installation correspondantes. Quant au sens du toucher, des « capteurs de force et de couple » leur permettront de « sentir » et de contrôler les mouvements d’un composant ou d’une interface de fixation ainsi que les pressions et les forces qui leur sont appliquées.
« Dans l’environnement exigu et très encombré où opéreront les robots d’assemblage, la vue et le toucher seront essentiels pour garantir la précision et la sécurité des déplacements et éviter ainsi d’endommager la chambre à vide et les composants situés à proximité », dit Raphaël Hery. Dès le mois de mars, Godzilla testera les outils en cours de développement sur des maquettes et des interfaces reproduisant l’environnement interne de la chambre à vide.
Qu’ils aient été développés en interne ou par l’agence domestique japonaise, les outils et technologies une fois validés sur la plateforme Godzilla, seront transférés et intégrés sur les robots chargés des opérations d’assemblage dans la chambre à vide. L’un de ces outils, le manipulateur mobile initialement construit et fourni par CNIM, sera adapté et optimisé. Quant au robot d’assemblage de la couverture, un monstre de 36 tonnes trois fois plus gros que Godzilla, il est actuellement en phase de conception détaillée et sera fabriqué chez Larsen & Toubro Ltd., en Inde.
Dans l’approche « vagues roulantes », deux robots d’assemblage de la couverture et un manipulateur mobile (ainsi qu’un manipulateur de secours) travailleront en parallèle tandis que les opérateurs postés sur des plateformes élévatrices mobiles spéciales, équipées de « zéro gravité », également en cours de développement, exécuteront les tâches manuelles.


Les préparatifs de la phase d’assemblage dans la chambre à vide ne se limitent pas aux opérations en cours dans le Bâtiment de préparation de l’assemblage du tokamak, chez Larsen & Toubro Ltd. (Inde), à l’institut pour les technologies de fusion de Naka (Japon) ou dans d’autres agences domestiques, dont l’agence européenne qui est chargée de fournir le système de télémanipulation du divertor dans la chambre à vide.
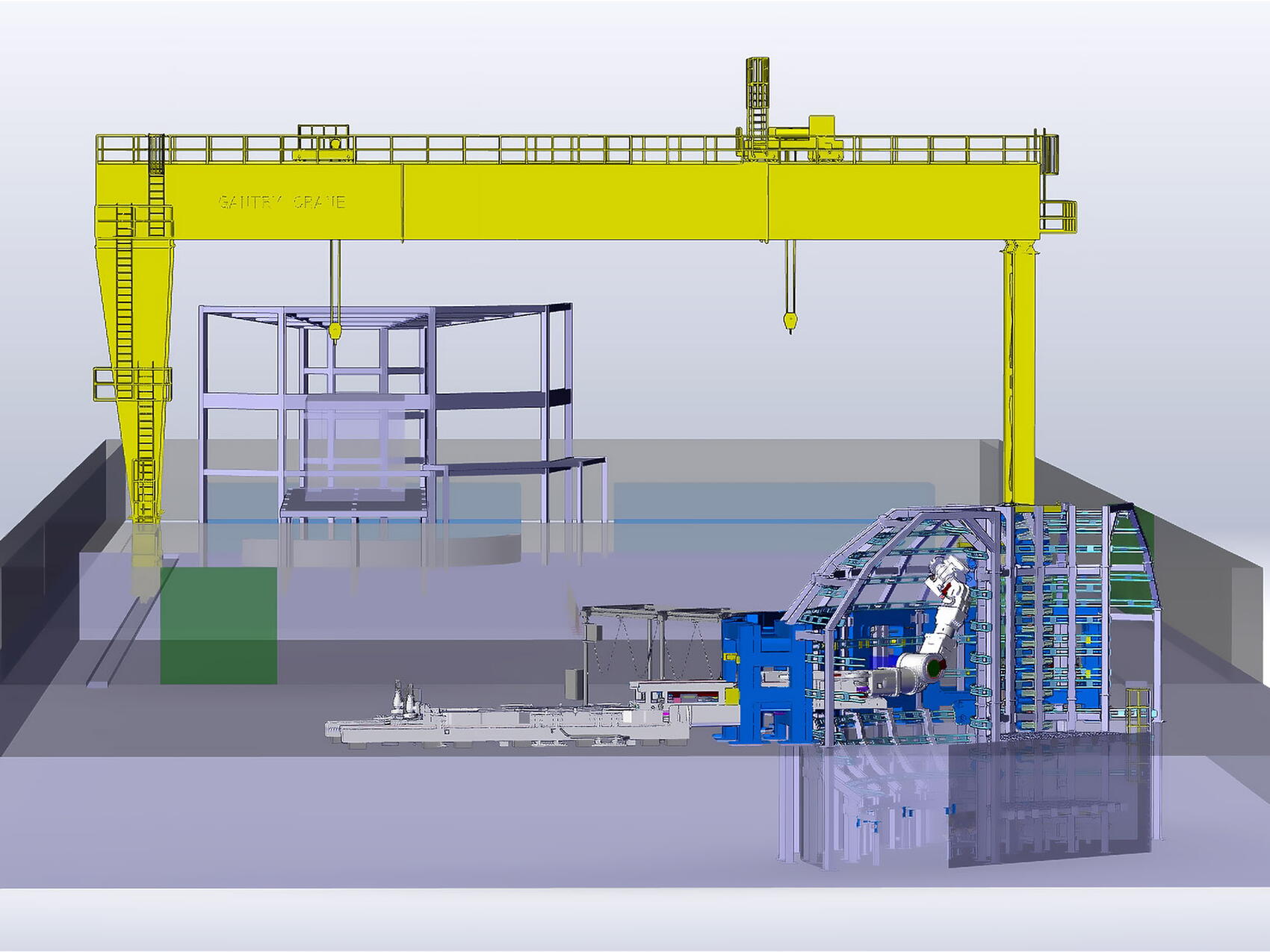
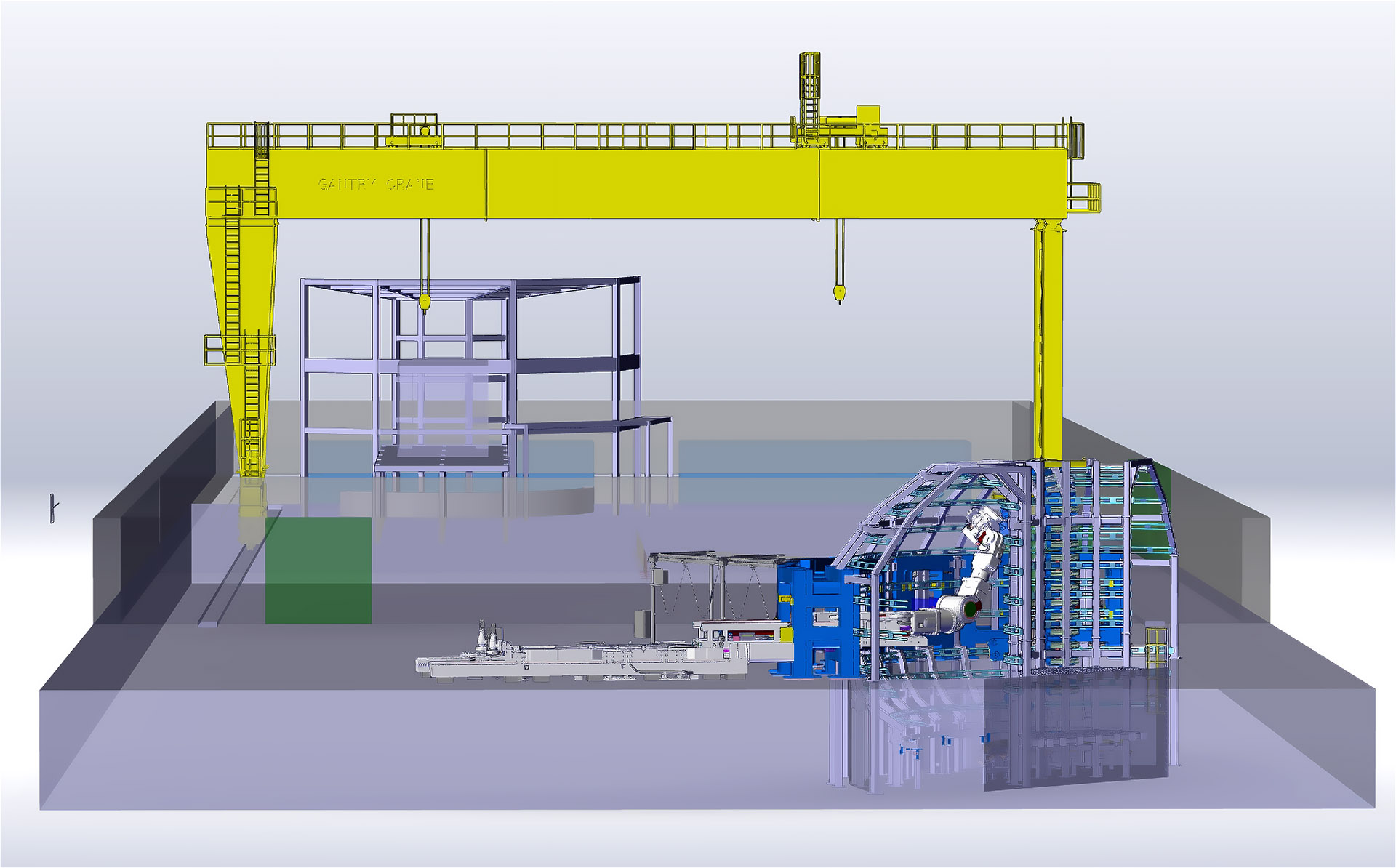
Sur le site, deux « squelettes » en acier, qui représentent chacun un tiers de la chambre à vide d’ITER (voir illustration), permettront aux opérateurs de se familiariser avec le fonctionnement des robots d’assemblage. Le premier d’entre eux, qui se trouve dans l’ancien Atelier du cryostat, sera équipé d’un manipulateur mobile. Dans un bâtiment adjacent, actuellement en construction, une installation similaire accueillera un robot d’assemblage de la couverture et d’autres équipements lourds destinés à l’acheminement, à la manipulation et à l’installation des modules de couverture. De l’espace a également été réservé pour les travaux à venir dans d’autres bâtiments de la plateforme ITER.
« Le développement de systèmes et de procédures fiables pour préparer les opérations d’assemblage dans la chambre à vide est une tâche absolument colossale », souligne Raphaël Hery. Alors que l’exploitation proprement dite ne commencera pas avant plusieurs années, les équipes doivent dès à présent respecter un calendrier très serré. » Une fois que tout sera prêt, la symphonie des vagues roulantes se jouera quasiment sans entracte, 24h/24 et 6 jours par semaine pendant une durée de deux ans environ.