ITER and industry push robotics into new territory
Specialized robots, machine vision systems and force-sensing technologies are helping ITER tackle one of fusion’s toughest engineering challenges: assembling and eventually maintaining the interior of the tokamak.
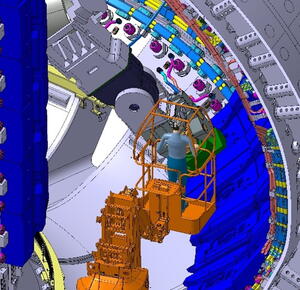
Giant robotic arms maneuvering multi-tonne components inside the ITER tokamak can resemble science fiction. Long, snake-like manipulators extend deep into the vacuum vessel through narrow ports, lifting and positioning bulky components inside one of the most constrained industrial environments ever constructed.
But for the engineers responsible for in-vessel assembly, robotics is not futuristic experimentation. It is essential infrastructure for fusion construction and future maintenance.
“We are preparing for the future while we are building this machine,” said ITER handling and robotics expert Raphael Hery in a dedicated session on the topic during the third ITER Public-Private Fusion Workshop in April.
These developments are part of the overall strategy to prepare for the in-vessel component installation phase, during which a variety of components will have to fit inside the vessel within limited space.
Because radiation levels inside the vacuum vessel will eventually make direct human access impractical during high-power operations, ITER’s in-vessel components were designed from the beginning for remote handling.
That requirement creates engineering challenges far beyond those found in conventional industry. Some blanket manifolds rise as high as 7.5 metres. Blanket shield blocks can weigh up to 4 tonnes, while divertor cassettes reach 9 tonnes.
Many of these components must be maneuvered through narrow openings, transported to locations around the vessel and positioned with extreme precision in an environment tightly packed with structures, cooling systems and plasma-facing components.
As a result, the robotic technologies being developed for today’s assembly activities are also laying the groundwork for future maintenance operations.
Building robots for fusion
To meet these requirements, ITER and its industrial partners are developing a new generation of heavy-duty robotics adapted specifically for fusion environments. “Many of the systems we use do not have any equivalent on the market today,” says Hery.
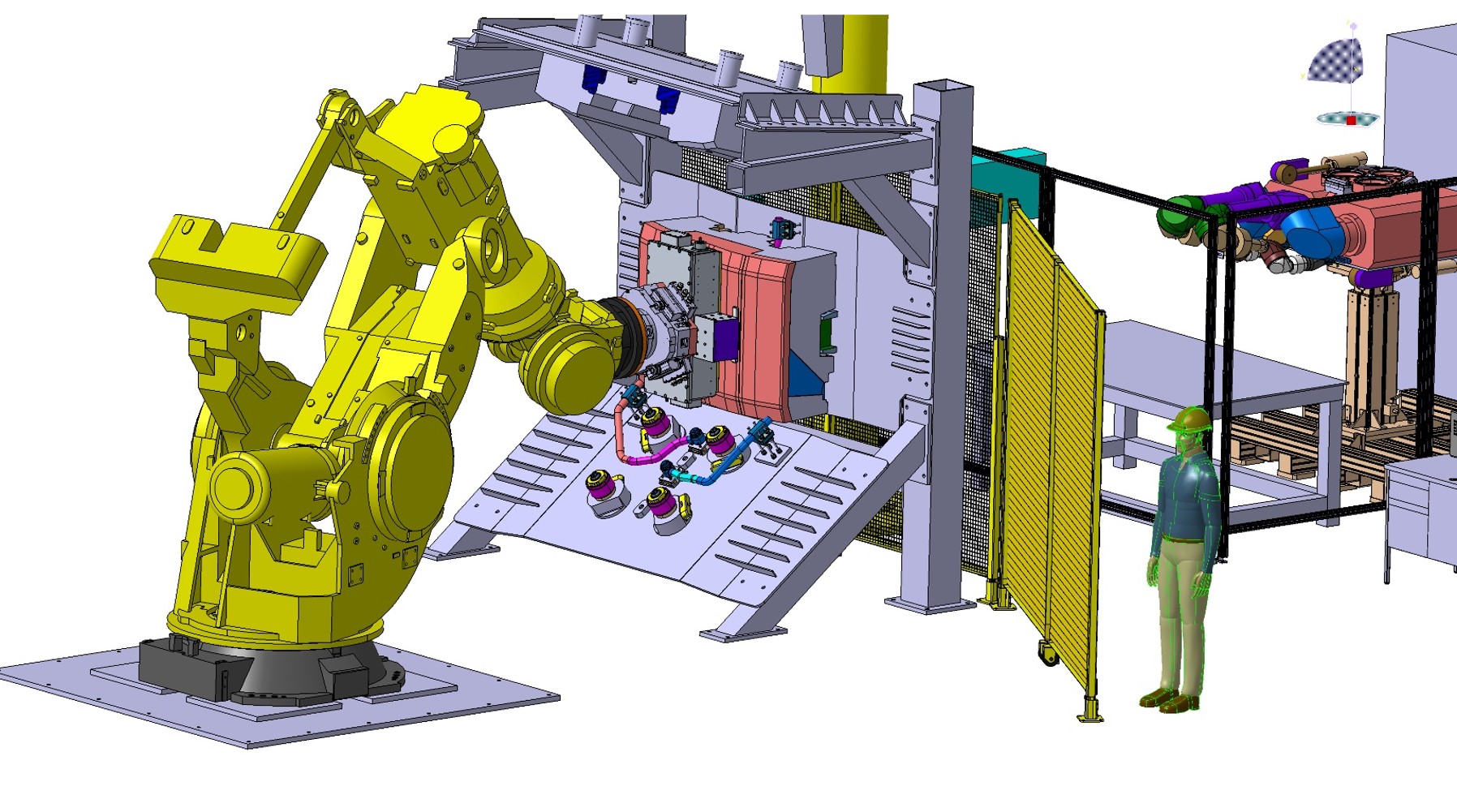
One example is the blanket assembly transporter, a long-reach robotic arm designed to install shield blocks and first-wall components inside the vessel (see the grey and black tool in the image, left). ITER is also developing specialized divertor assembly systems, remotely operated handling equipment and modular staging platforms that allow personnel to work safely alongside robotic operations during assembly phases.
The robots themselves are only part of the challenge. ITER engineers also need systems capable of something closer to human perception. “What a typical robot lacks is the sense of touch and the sense of vision,” says Hery.
That challenge has driven increasingly close collaboration between ITER, universities, startups and specialized industrial suppliers working together to adapt existing technologies—and in some cases invent entirely new ones—for fusion applications.
Giving robots sight
Physical reach and lifting capacity are only part of the problem. Operators also need robots that can perceive and react to their surroundings with extreme precision.
Workshop participant Olli Suominen described how machine-vision systems originally developed through academic research are now being adapted for ITER’s remote-handling operations.
Suominen began the work as a researcher at Tampere University in Finland before later joining the spin-off company Operview, which now collaborates with ITER on robotic vision technologies.
The challenge his team is trying to solve is deceptively simple. Operators controlling robots through camera feeds can generally see what they are doing, but precise alignment inside the vessel becomes far more difficult when handling large components over long distances.
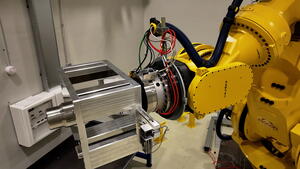
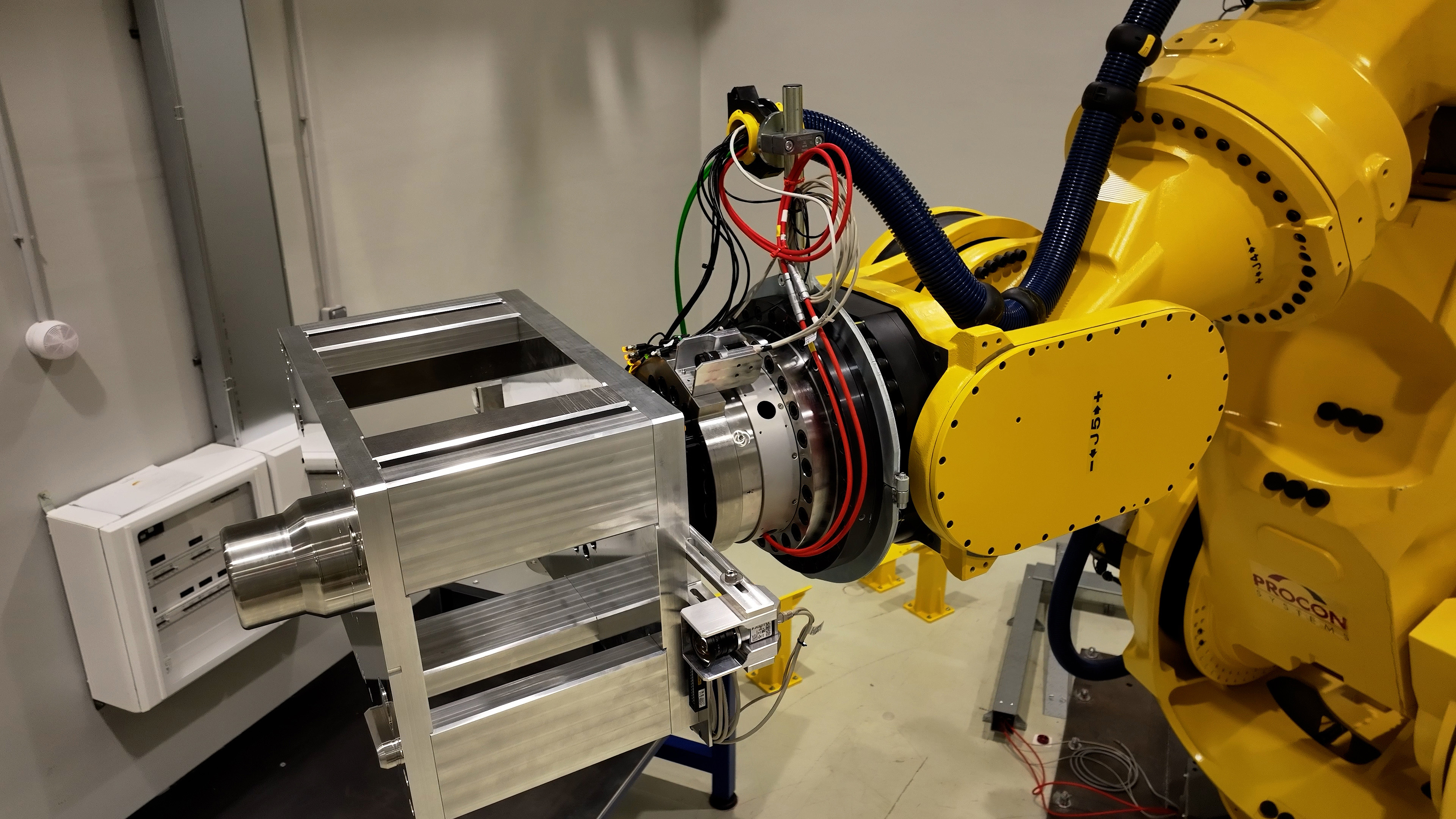
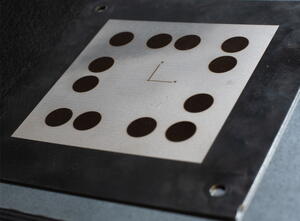
Large robotic arms naturally deform under heavy loads. Once multi-tonne components are attached, the robot’s actual position can differ from its theoretical one. Vision systems help compensate for those deviations, allowing operators to align components precisely using optical markers laser-etched directly onto stainless steel surfaces (see the Pi-Tag fiducial marker above)—a solution that is compatible with vacuum and radiation environments.
“If you add cameras that will behave as your eyes and your sense of sight, then the robot can use references in its environment to know where it is exactly,” says Hery, adding that tests have shown the vision systems can achieve positioning precision of roughly 0.06 millimetres—smaller than the thickness of a human hair.
Giving robots touch
ITER engineers are also equipping assembly and maintenance robots with tactile feedback. Working with German measurement technology company HBK, ITER is developing specialized force-torque sensors that allow robotic systems to detect contact forces while manipulating shield blocks and first-wall components.
“These sensors are able to provide a sense of touch,” company representative Tim Ahlswede said during the workshop.
The sensors help the robot control system determine when a component has touched another surface, avoiding damaging collisions and adjusting the motion of the long robotic arm that extends into the vessel, according to Ahlswede. “When a heavy object is attached to a long arm it bends slightly, like a fishing rod when a fish is caught.”


Without force sensing, releasing the heavy load could trigger dangerous movement throughout the structure. The sensors allow the control system to gradually reduce tension from the payload before disengagement, minimizing vibration and improving positional stability inside the vessel.
Fusion environments also impose unusual engineering requirements on the sensors themselves. One of the biggest challenges for the HBK team was ensuring the systems could tolerate radiation exposure while still maintaining precise measurement performance. The company tested specialized strain gauges, cabling and materials at irradiation facilities before selecting suitable components. ITER’s seismic requirements added another layer of complexity, requiring the sensors to tolerate loads far beyond normal operating conditions.
Building an innovation ecosystem
Engineers at ITER typically develop the initial concepts and preliminary designs internally before working with industrial partners to transform those ideas into operational systems. “We push the design to its theoretical performance limits,” Hery says. “Then, to make it a reality, we liaise with expert companies.”
In some cases, that means adapting existing industrial technologies to ITER’s specific requirements. In others, it means developing entirely new approaches.
For Hery, that collaborative model is becoming central to ITER’s in-vessel assembly progress. “We are developing robotic technologies at an unprecedented combination of size and payload capacity scale,” he says.
The systems being developed for ITER are pushing industrial robotics into new territory and creating a new class of heavy-duty robotics adapted specifically for fusion environments.